
Мягкий робот для Марианской впадины
Робот с автономным питанием, по внешнему виду и способу перемещения похожий на рыбу, может выдержать экстремальное давление и исследовать неизведанный океан на дне самой глубокой океанской впадины благодаря своему мягкому корпусу и распределенной в нем электронной системе.
Большие глубины океанов по-прежнему остаются одной самых недоступных территорией на Земле, поскольку подводные аппараты для их исследований требуют водонепроницаемых корпусов из прочных металлических материалов, толщину стенок которых приходится значительно увеличить, чтобы они могли выдержать колоссально высокое давление. Ведь на дне Марианской впадины, глубина которой превышает 10 километров, верхний столб воды оказывает давление 1086 бар, что более чем в 1071 раз превышает стандартное атмосферное давление на уровне моря.
Но в то же время на глубинах в несколько километров обитают мягкие организмы, выживающие без жестких оболочек. Так, на глубине около восьми километров ученые наблюдали рыб из семейства липаровых. Одна из особенностей этих рыб – строение скелета, который не до конца окостеневший и частично состоит из хрящевой ткани, а череп имеет несплошное строение и частично открыт.
В новом роботе, созданном Чжэцзянским университетом и лабораторией Чжэцзянского научно-исследовательского института, хрупкие электронные компоненты встроены и распределены также в мягком силиконе. Таким образом, получилась конструкция, которая не требует применения устойчивых к высокому давлению корпусов.

Область мягкой робототехники, во многом вдохновленная живыми организмами, включает создание роботов из податливых материалов, в частности, силикона. Такие мягкие роботы по своей природе более безопасны в сравнении с широко распространенными обычными жесткими аналогами. Их податливость может расширить возможности применения и позволит легко исследовать подводные объекты даже на больших глубинах, втискиваясь в ограниченное пространство или перемещаться по неровным поверхностям.
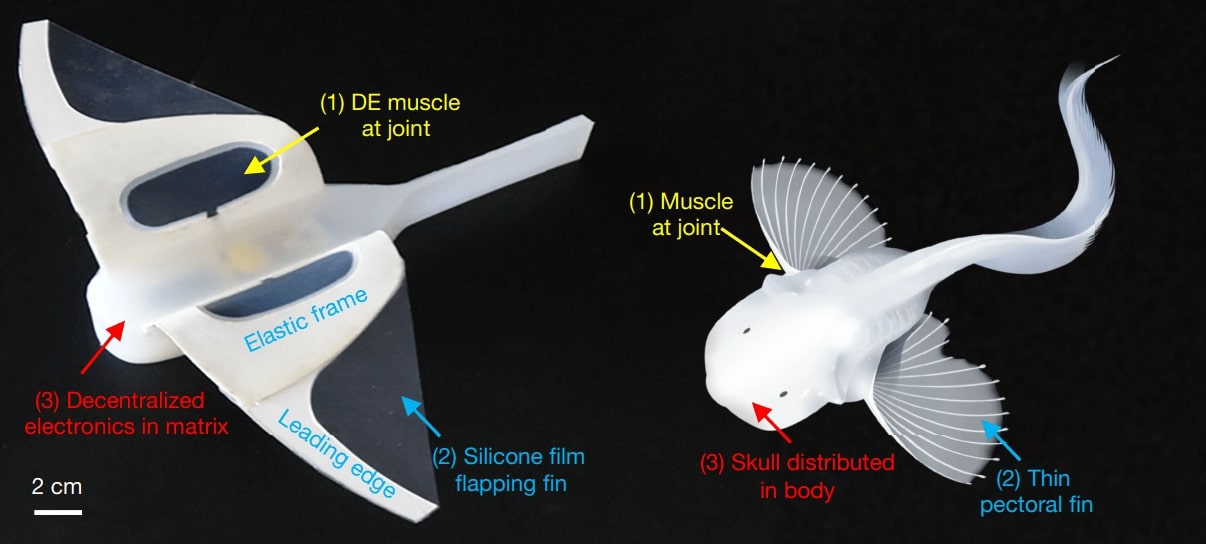
Оригинальный робот выполнен в форме рыбы и имеет два машущих боковых плавника. Авторы разработки использовали хорошо зарекомендовавший себя механизм управления взмахами: плавники прикреплены к «мышцам» тела робота, которые сделаны также из мягкого материала, способного преобразовывать электрическую энергию в механическую работу — когда электрический ток от батареи робота подается на мышцы, они сокращаются. Крошечные приводы механически соединяют сокращающиеся мышцы с плавниками, заставляя их взмахивать.

Одна из проблем, с которой столкнулись ученые, заключалась в том, чтобы найти способ защитить электронные компоненты робота от высокого давления. Вдохновленные костями черепа хадальской улитки (Pseudoliparis swirei), авторы рассредоточили электронные компоненты, а не упаковывали их вместе, как это обычно делается в электронных устройствах. Лабораторные испытания и моделирование показали, что такое расположение снижает напряжение на стыках между компонентами, находящимися под давлением. После монтажа распределенная электроника была залита силиконом и установлена в робота. Этот подход более практичен и дешевле, чем другие методы защиты электроники в глубоководных устройствах.

Во время исследований была впервые протестирована способность робота к плаванию, в камере с водой под высоким давлением — робот был подключен к шесту, который позволял плавать по кругу в специальной лаборатории. Затем машина была испытана в озере на глубине 70 метров, где она свободно плавала со скоростью 1,9 метра в минуту, а также в Южно-Китайском море на глубине около 3200 метров. При этом удалось достичь скорости 3,11 м/мин (эквивалентно 0,45 длины тела в секунду), что соответствует возможностям других подобных роботов. Наконец, движение робота были проверены в Марианской впадине, где он был подключен к обычному подводному роботу для поддержки, который также сделал снимки теста.

Дальнейшим развитием конструкций подобных устройств являются разработки мягких роботов для использования на значительной глубине – для задач, в которых необходимо деликатно взаимодействовать с объектами, поскольку обычные роботизированные сенсоры плохо работают в такой среде. Исследования подтвердили, что мягкие роботизированные захваты обладают существенными преимуществами по сравнению с жесткими при сборе и работе с хрупкими морскими организмами.
В перспективе мягкие роботизированные рыбки, устройство которых вдохновлено биологией, смогут плавать среди других животных, не беспокоя их, что позволит изучать их вблизи. А в дальнейшем с их помощью могут открыться возможности для исследований морской биологии, в которых мягкие роботы будут безопасно перемещаться по коралловым рифам или подводным пещерам, чтобы собирать хрупкие образцы, не повреждая их.
Однако предстоит произвести еще больше работы, прежде чем можно будет заселить океан роботами такого типа. При всех положительных свойствах, разработанный робот имеет недостаточную скорость перемещения и не сможет противостоять подводным течениям, которые легко смогут его унести. Его двигательные возможности также необходимо будет оптимизировать для практического применения. Однако, данный подход закладывает основы для будущих поколений стойких и надежных роботов-исследователей большой глубины.