
Американский стартап создаст робота-прыгуна для исследования сложных участков на Луне
Частная космическая компания Intuitive Machines, которая недавно смогла посадить свой модуль «Одиссей» в южном приполярном регионе Луны, объявила о разработке нового аппарата. На этот раз инженеры компании создадут прыгающего робота для исследования постоянно затененных районов земного спутника и неровной поверхности, в том числе крутых склонов, кратеров и возвышенностей — сложных участков, которые в будущем инженеры могут использовать под строительство лунных баз.

Прежде чем люди отправятся заселять наш спутник, на его поверхности необходимо построить укрытие — причем в таком месте, которое будет отвечать целому ряду требований. Например, защищать от радиации, низких температур (в отличие от Земли, Луна лишена плотной атмосферы и магнитного поля, которые служат щитом для нашей планеты), обеспечивать базу электроэнергией и водой.
Ученые отдают предпочтение областям южного полюса Луны. Во-первых, там много затененных районов, содержащих большое количество льда, а значит, воды. Во-вторых, рядом с кратерами вечной тени есть области, в которых Солнце никогда не заходит, — так называемые пики вечного света. Эти районы позволят колонистам постоянно использовать солнечную энергию для питания жизненно важных систем.
Однако до начала строительных работ необходимо провести разведку местности, чтобы заранее обозначить опасные участки и обойти их стороной. С орбиты осуществить такую разведку непросто, но полную информацию могут предоставить наземные роботы, которые будут напрямую контактировать с лунной поверхностью.
В начале апреля американская частная космическая компания Intuitive Machines поделилась планами по созданию робота для исследования сложной местности на южном полюсе Луны — постоянно затененных регионов, неровных и глубоких объектов, кратеров и крутых склонов. Об этом представители компании рассказали на 55-й ежегодной конференции о Луне и планетах (LPSC 2024), которая проходила в середине марта недалеко от Хьюстона (США).
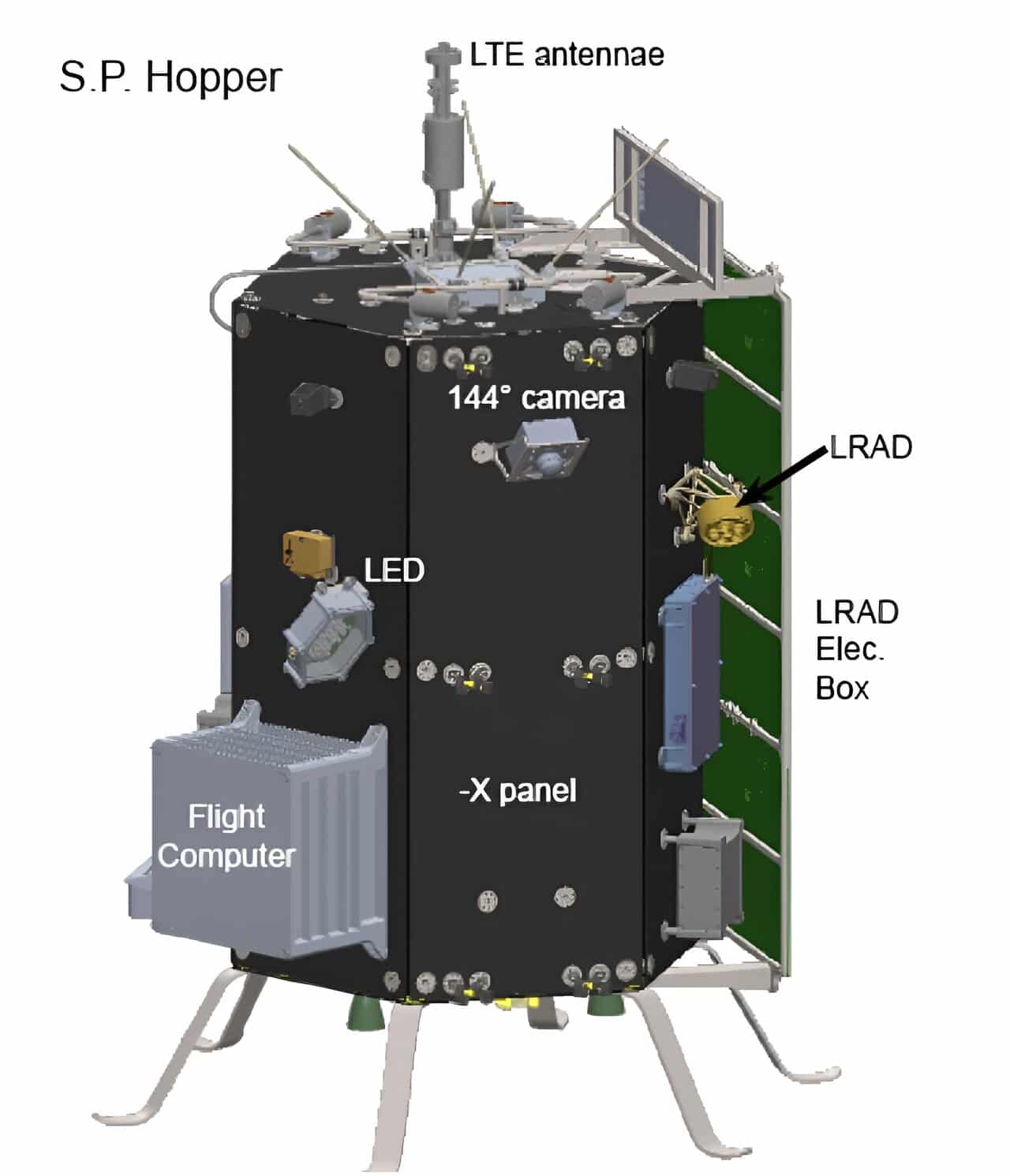
Робот получил название South Pole Hopper. Он будет представлять собой небольшой полностью автономный аппарат массой 35 килограммов и высотой 70 сантиметров, оборудованный серией научных приборов. На поверхность Луны робот доставит посадочный модуль IM Nova-C, который также разрабатывает американский стартап.
В документе, представленном Intuitive Machines, описано несколько технических особенностей South Pole Hopper. В частности, там говорится, что аппарат будет иметь систему точной посадки и предотвращения опасных ситуаций (PLHA) — она заранее отображает участок лунной поверхности, вычисляет на нем опасные районы и направляет робота к безопасному месту. Робот сможет «садиться» на объекты с углом наклона до 10 градусов, а также передвигаться в условиях низкой освещенности.
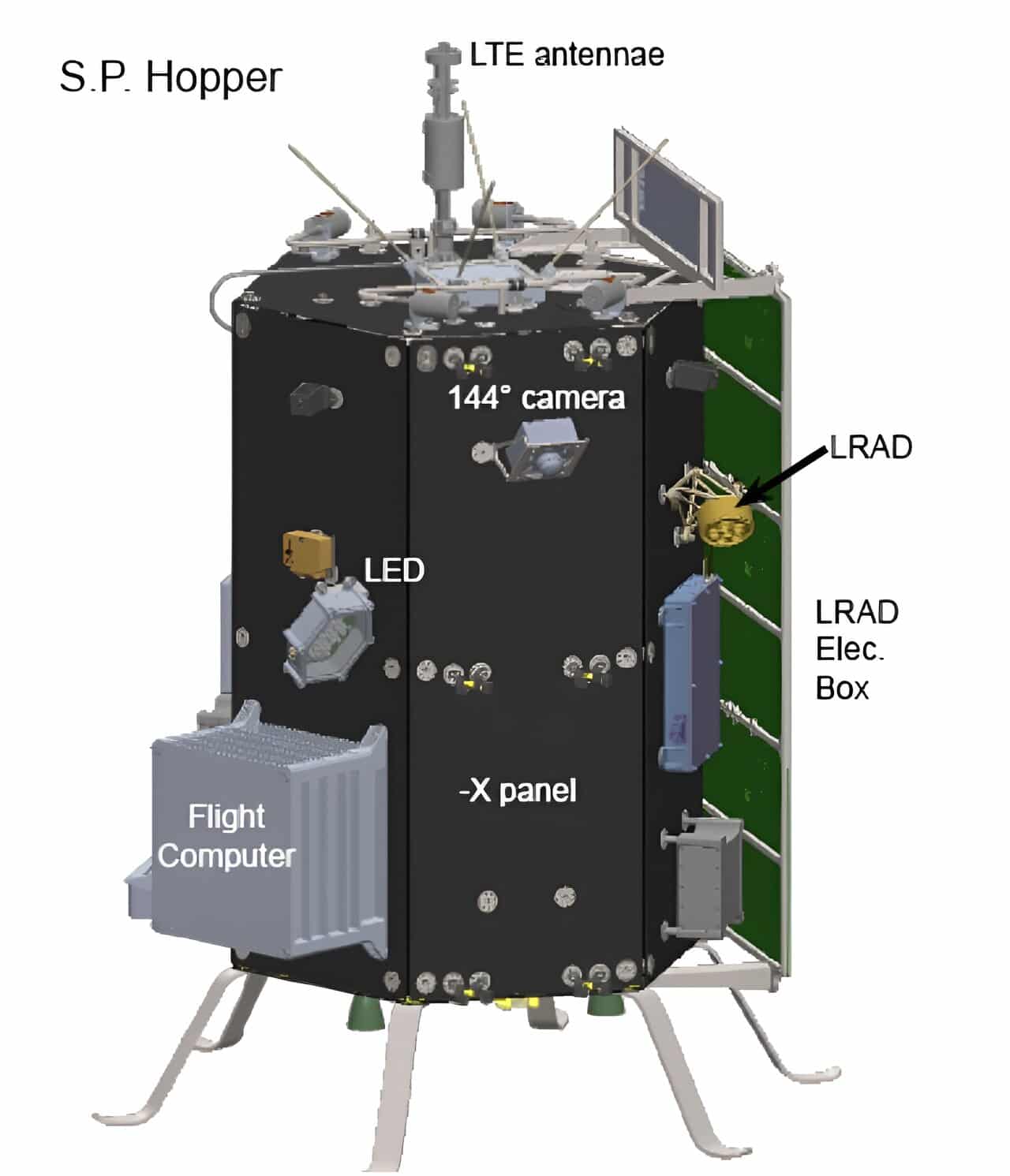
South Pole Hopper будет поддерживать связь с Nova-C через систему LTE (беспроводная высокоскоростная передача данных). Она позволит роботу «общаться» с посадочным модулем, даже когда тот будет находиться вне поля зрения.
Для сбора данных робот будет использовать три основных научных инструмента:
— Две КМОП-матрицы (CMOS imaging systems), состоящие из набора светочувствительных пикселей, способных преобразовывать световую энергию в заряд, на основе которого формируется конечное изображение, полученное сенсором. Во время полета эти системы будут вести непрерывную стереосъемку и помогать в навигации. Снимки, полученные КМОП-матрицами, будут передаваться на Землю для анализа;
— Систему термоэлементных датчиков LRAD для измерения яркости реголита в инфракрасном диапазоне, а также поиска водяного льда;
— Нейтронный спектрометр PLWS для поиска водорода.
За время работы South Pole Hopper должен будет решить четыре важных задачи:
— Определить геологические свойства конкретного хребта на южном полюсе, в том числе внутри затененного района;
— Определить яркостные температуры поверхности некоторых областей, как частично освещенных солнечными лучами, так и лежащими в затененных районах;
— Изучить тепловую инерцию реголита в месте посадки;
— Определить, сколько водорода содержится в лунном грунте, в том числе в затененных областях.
Одна из самых примечательных особенностей South Pole Hopper — он сможет прыгать, причем полностью в автономном режиме и независимо от условий местности. Планируется, что робот сделает всего пять или шесть прыжков.
Первый — «вводный прыжок» на 20 метров в течение 24 часов после прилунения; он необходим, чтобы команда инженеров получила данные о техническом состоянии робота. Затем South Pole Hopper прыгнет на 100 метров. Этот прыжок будет скорее «демонстративным»: он должен показать, что такие прыгучие роботы, как South Pole Hopper, вполне подходят для исследования Луны.
Потом последует прыжок на 300 метров до края кратера Марстон (Marston crater) — части хребта, соединяющего кратеры Шеклтон и де Герлах (Shackleton — de Gerlache ridge). Далее — в сам кратер, в затененную область, а потом робот вернется к хребту. Если останется топливо, South Pole Hopper совершит шестой прыжок, во время которого аппарат исследует окрестности.
По словам инженеров Intuitive Machines, робот появится на свет в 2024 году, а на поверхности Луны окажется уже в ноябре-декабре этого года в случае успеха миссии.
Нашли опечатку? Выделите фрагмент и нажмите Ctrl + Enter.