
Автоматы в космосе: никаких перспектив замены человека
Содержание страницы
Не так давно посадочный аппарат InSight, принадлежащий NASA, открыл на Марсе рекордных размеров озеро. Достижения автоматов в изучении других планет огромны – но, увы, с их помощью невозможно ответить на самые интересные для нас вопросы. Есть ли жизнь на Марсе? Что прячется в километровых лавовых трубках Луны? Обо всем этом нам смогут рассказать только пилотируемые экспедиции ближайших десятилетий. Попробуем детально разобраться, почему автоматы в одиночку не могут решить основные проблемы изучения ближайших небесных тел.
Автомат или человек?
Дискуссия о том, кто лучше может освоить космос – человек или робот, – началась еще в середине XX века. Конструктор Бабакин, возглавлявший Конструкторское бюро Лавочкина (создатель луноходов), был, возможно, первым, кто четко сформулировал мысль: автоматы могут сделать все действительно нужное человечеству в космосе дешевле, чем человек. И хотя Королёв был последовательным противником этой точки зрения, в силу известных событий, в изучении других небесных тел СССР пришлось, в отличие от США, полагаться только на автоматы.
Сторонники автоматов обычно называют следующие их очевидные преимущества: роботизированным системам не нужны воздух, вода и еда, поэтому они компактны. Типичный марсоход стартует на ракете на порядок менее мощной, чем та, что нужна для отправки на Марс людей. Соответственно, автоматами изучать все намного дешевле. Однако, как это часто бывает, дорога в «автоматический космос» оказалась гладкой только на бумаге. И, если задуматься, этого стоило ожидать с самого начала.
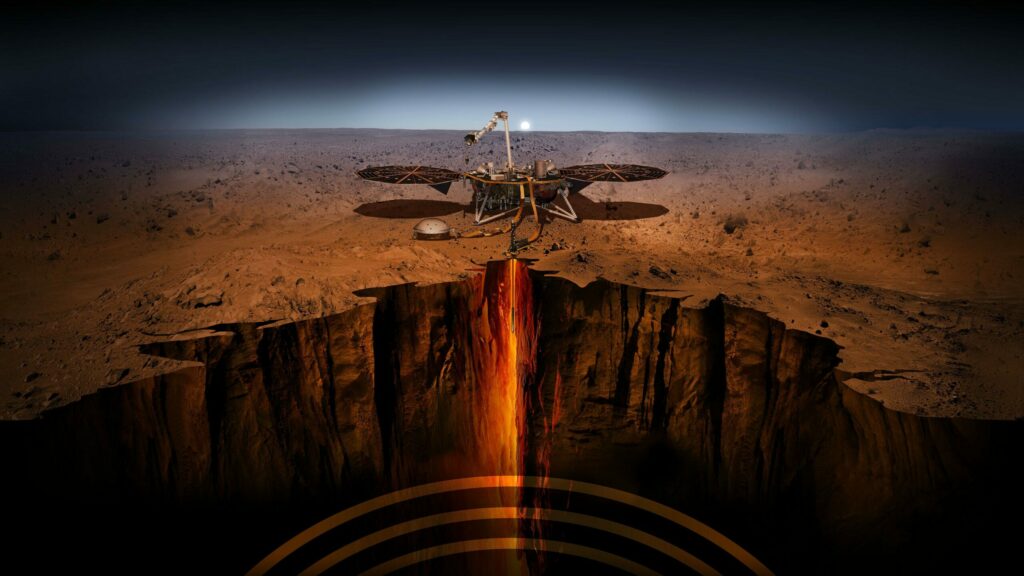
Марсианский InSight: бурение не глубже детской песочницы
На поверхность Марса 26 ноября 2018 года успешно сел несамоходный посадочный аппарат InSight. При весе в 350 килограммов пиковая мощность устройства составила 600 ватт, что делает его рекордно мощным: такой пиковой электрической мощности не было еще ни у одного аппарата, который земляне смогли доставить на другую планету. Манипуляторами он поставил на поверхность Красной планеты сейсмометр, а 28 февраля 2019 года попытался приступить к бурению.
Оно, опять же, намечалось рекордным. До сих пор самое глубокое бурение марсианской поверхности было на уровне лишь 7,5 сантиметра (да и эта цифра может быть чуть преувеличенной). Сверло марсохода Curiosity, порой неверно называемое буром, просто не могло бурить глубже. InSight должен был углубиться на пять метров. Это очень важно, поскольку, согласно современным представлениям, только глубже двух метров на современном Марсе может существовать примитивная одноклеточная жизнь: грунт на такой глубине хорошо защищает от холода и может содержать немало воды.
На самом InSight не было приборов для обнаружения жизни, они просто не поместились. Во время бурения должен был быть замерен только поток тепла из глубин планеты для уточнения геологической активности ее недр. Но самая первая проба глубокого бурения на Марсе по крайней мере показала бы, что поиск жизни автоматом здесь возможен.
Увы, бур смог углубиться только на 35 сантиметров, прежде чем по неизвестной причине встал. Он то ли наткнулся на камень, то ли просто не смог нормально работать в осыпающемся грунте. Хотя это все равно рекордно глубокое бурение, цели аппарат не достиг. Измерить тепло от недр планеты он мог бы на глубине не более трех метров. Основная задача InSight пока сорвана, и сомнительно, что она будет выполнена когда-либо. Миссия стоимостью в 830 миллионов долларов не часто заканчивается так печально.
Аппарат ограничен по массе, поэтому у него нет подвижности (на шасси ушли бы сотни килограммов). Переставить бур на другое место он не может. Пожалуй, это одна из лучших иллюстраций ограниченности возможности автоматов на других небесных телах. Человек с элементарным заступом мог бы углубиться куда глубже, а если там сплошная скала – отойти чуть в сторону. Увы, что легко нам, пока недоступно нашим машинам на других планетах.
В то же время InSight получил большой утешительный приз. Согласно утекшим в прессу предварительным данным, он магнитометрическими приборами обнаружил под поверхностью Марса в районе высадки слой электропроводящего материала толщиной в четыре километра. Красная планета не имеет активной геологии, и единственный предложенный на сегодня кандидат на наполнитель такого электропроводящего слоя – вода с растворенными в ней солями.
Если эти данные подтвердятся, выйдет, что под InSight лежит довольно глубокое подповерхностное море. Именно такого названия заслуживает водоем с толщей воды в четыре километра. Подобные водоемы давно считаются одними из лучших кандидатов в места обитания простейшей жизни. Похожие места в Антарктиде (озеро Восток) содержат микроорганизмы, несмотря на то, что они скрыты под толщей льда многие миллионы лет.
Отдельно поясним: InSight, на самом деле, не робот. Он бурил (по крайней мере, пытался) не по заданной программе, а по серии команд, которые ему подавали с Земли.
Где же автономные роботы?
Может возникнуть вопрос: почему мы говорим о дистанционно управляемых машинах, а не об автономных роботах? Обычный серийный дрон за какие-то 500 долларов имеет и камеры, и софт, позволяющие избегать деревьев, веток и людей в полете. На более серьезных колесных беспилотниках от «Яндекса» или Waymo камеры больше и даже лидары есть, да и программное обеспечение посерьезнее, поэтому они видят препятствия в сложной среде на сотни метров вперед. Почему нельзя сделать что-то подобное для планетохода?

К сожалению, вал новостей о том, как много могут современные беспилотные летательные аппараты (БЛА), во многом подчиняется «беспилотной» моде, отчего описывает их возможности несколько преувеличенно. Пресса редко напоминает, что БЛА разбиваются в 30-300 раз чаще на час налета, чем обычные летательные аппараты. Причем главные причины крушений – технологические, а вовсе не ошибки оператора. Чаще всего причиной аварии БЛА становится банальная потеря связи дрона с оператором: беспилотник при этом переключается в полностью автономный режим, а тот как раз уступает человеку-оператору в способности безаварийно летать.
Большая аварийность БЛА не случайна, а закономерна: никакого сильного ИИ на сегодня нет, а без него иметь такую же безопасность перемещения, что и у человека с его мозгом, дрон не может. Чтобы управлять движением, надо понимать, что видишь перед собой: например, какие препятствия лежат на пути и есть ли они. Нынешний ИИ может эффективно различать объекты (ветки, провода, иные препятствия) в благоприятных условиях, когда они соответствуют образам, заложенным в его память.
Но солнечный блик, тень от дерева и масса других факторов могут сделать вроде бы каталогизированный образ препятствия неразличимым для дрона. То, что мы называем зрением, по сути, неотделимо от умения распознавать образы. Воробей делает это очень неплохо, но дрон – не воробей: его «мозги» не позволят лететь в сложных условиях без аварии достаточно длительное время.
Именно по этой причине автопилоты на современных самолетах – вовсе не «роботизированный полет», а лишь продвинутый круиз-контроль, облегчающий работу летчикам. Самолетный автопилот точно так же лишен интеллекта, поэтому пилоты с депрессией и могут использовать его, чтобы врезаться на управляемом ими авиалайнере в гору. И, как отмечают пилоты авиалайнеров, сложно не только жертвам депрессий: ключевой проблемой автопилота признана «неспособность принимать нестандартные решения, которые зависят от конкретной ситуации».
Летающим дронам обходиться без человека-оператора вообще-то намного проще, чем наземным. Воздух – однородная среда, где очень низка плотность препятствий, в нем «много места» и не так много объектов. Наземная среда плоская и густо усеяна крупными препятствиями, которые нужно замечать и объезжать. К тому же поверхность, с которой сцеплены шасси наземного робота, крайне неоднородна: там есть и ямы, и камни, и песок, и многое другое.
Поэтому на самом деле никаких «беспилотных автомобилей», о которых так много пишет пресса, пока тоже нет. Новостники с удовольствием выносят в заголовки фразы «Waymo запустила сервис беспилотных такси в Финиксе», но редко упоминают факты о таких сервисах. А они заключаются в том, что в «беспилотном такси» в Финиксе ровно так же сидит инженер, который должен брать на себя управление в случае любой непредвиденной ситуации.
И даже в таком виде это такси не годится за пределами зон, нанесенных на лидарные карты высокого разрешения. Когда эти карты устаревают – при ремонте дороги и установке нового светофора, – «беспилотник» с лидаром просто едет на красный свет, как это было на улицах Сан-Франциско. Дополнительно осложняет дело то, что лидары в воздухе с водяными парами работают плохо, поэтому Waymo и запустило свой испытательный сервис – кстати, недоступный обычным пассажирам такси, только ограниченному кругу лиц – в столице не самого дождливого штата Невада.
С маркетинговыми целями и «Яндекс», и Waymo могут долго и упорно рассказывать о своих «беспилотных автомобилях», но на практике без человека за рулем вне рекламных поездок они не работают. И если настоящие беспилотники-авто появятся, то лишь у тех разработчиков, что занимаются автоматизированным подражанием водителям-людям, но не там, где пытаются ездить на основе стандартных алгоритмических решений, разработанных без участия поистине огромной обучающей выборки, основанной на человеческом вождении.
Проблема в том, что выборки вождения миллионов людей по марсианскому бездорожью на сегодня нет. Алгоритмические решения без этого не дадут настоящих, сравнительно безаварийных беспилотников и на Земле, поэтому говорить об их использовании на Марсе вдвойне сложно. Даже если бы они вдруг появились, речь идет о непростых решениях с большими энергетическими потребностями.
Nvidia Drive PX Pegasus дает до 310 триллионов операций в секунду, потребляя 500 ватт. Это в несколько раз больше, чем вся располагаемая постоянная мощность марсохода Curiosity (чуть больше сотни ватт) – да и любого планетохода в истории. И это мы еще не посчитали мощность лидара, многих камер, ультразвуковых сенсоров. Конечно, есть более энергоэффективные решения (компьютер Tesla требует всего 72 ватта и не нуждается в лидаре), но они могут работать, напомним, только за счет обучения на огромной выборке реального вождения водителей-людей. Попросту говоря, на Красной планете это не реализовать.
Единственный шанс на автономность аппарата для исследования других планет – полеты в атмосфере, где нет булыжников, опасности буксовать и многих других неприятностей. Но марсианская атмосфера примерно соответствует земному низкому вакууму: летать там энергозатратно. Венера вообще не подходит для полетов близко к поверхности – жарко. Луна, астероиды и большие спутники типа Европы и Ганимеда безатмосферны, и летать там не выйдет.
Теоретически подходит Титан, куда NASA планирует отправить «Стрекозу». Там летать в 38 раз менее энергозатратно, чем на Земле (вчетверо более плотная атмосфера). Практически выбор маршрута и действий аппарата ценой в миллиард долларов намного надежнее сделать с помощью удаленного оператора-человека. Если БЛА на Земле падают чаще пилотируемых аппаратов, то это просто еще один потерянный БЛА. На Титане это будет потеря миллиарда долларов и многих лет усилий высококлассных специалистов NASA. Никто не пойдет на такой риск – он просто не имеет смысла.
Иными словами, любые подвижные аппараты для изучения поверхности других планет будут де-факто дистанционно управляемыми во всем обозримом будущем – благо, никаких внятных перспектив создания сильного ИИ на сегодня не наблюдается.
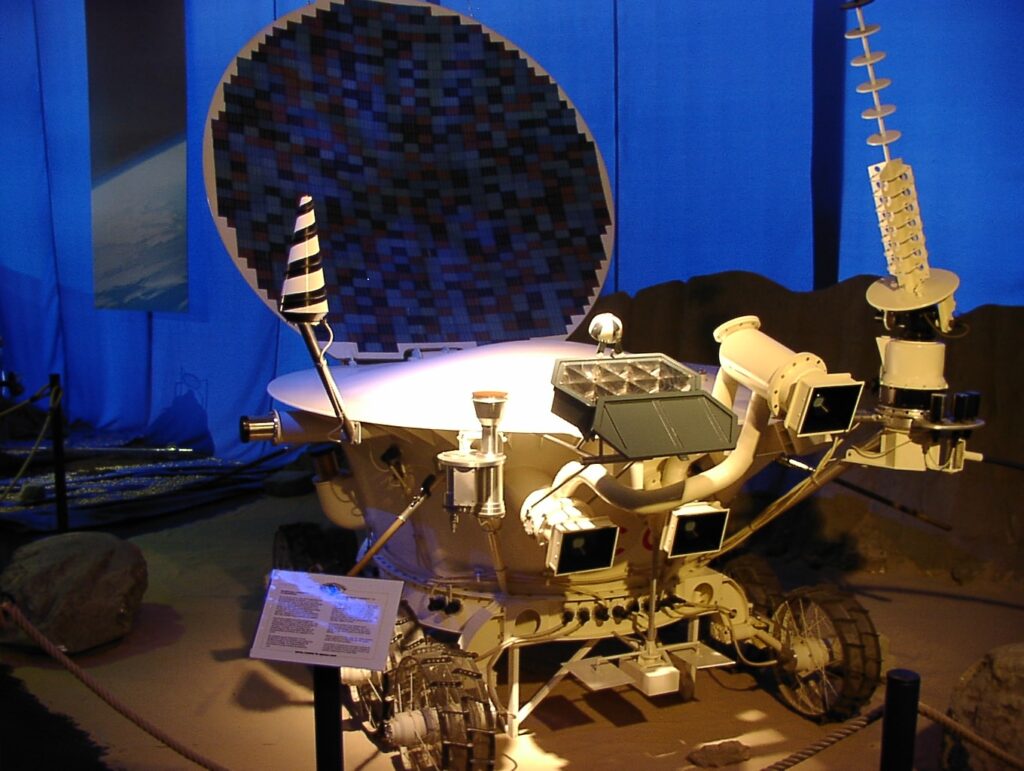
Зачем NASA «Стрекоза»
В июне 2019 года NASA объявило о намерении послать на Титан Dragonfly («Стрекоза»). Достаточно взглянуть на внешний облик этого восьмивинтового летающего аппарата, чтобы понять, насколько он отличается от классического облика планетохода, в основном оставшегося неизменным со времен «Луноходов». У него нет колес, только шасси вертолетного типа для приземления. Чтобы передвигаться, он должен летать.
Как известно, полет энергетически затратен. Это особенно верно потому, что энергии у небольшого аппарата не так много: он будет питаться от радиоизотопных термоэлектрических генераторов с КПД всего в несколько процентов. Значит, ему понадобится заметное количество плутония-238. Чтобы почувствовать всю остроту ситуации, стоит вспомнить: такой генератор дает всего 100-125 ватт мощности при весе в 45 килограммов. Curiosity питается именно от такой системы на российском плутонии-238, но ему хватает: шесть колес вращаются небольшим электромотором. Для полета же энергии надо больше.
Но летательный аппарат не может быть слишком тяжелым (масса «Стрекозы» – всего 300 килограммов), то есть ему придется брать побольше топлива и поменьше научных приборов. Может, именно поэтому на его борту нет бура, хотя узнать что-либо о недрах Титана было бы хорошо. Зачем NASA идет на такие жертвы, заставляя летать то, что, казалось бы, рождено, чтобы ползать?

Все объясняется просто: в полете нет опасности застрять в дюне – навигация в воздухе проще, чем на поверхности, и вполне доступна программному обеспечению. Поэтому «Стрекоза», согласно плану, сможет преодолеть целых 175 километров за время службы – и при этом заглянуть в дюжину различных мест близ экватора Титана. Как гордо пишет NASA, это «примерно вдвое больше дистанции, преодоленной всеми марсоходами, вместе взятыми». Пожалуй, это ключевая фраза.
Почему планетоходы так неэффективны
NASA не зря оценивает запас хода в 175 километров как достижение огромной значимости. Для изучения чужого небесного тела надо увидеть разные его части. В одних местах Марса выделяется метан, в других – нет. В одних есть что-то вроде потоков воды, в других – нет. Одни интересные регионы находятся на большой дистанции от других. Добраться более чем до одного из них во время роботизированной миссии было бы важно.
Между тем автоматам это удается очень плохо. «Луноход-2» проезжал более 300 метров в сутки. Opportunity преодолевал порядка трех километров за год. Причина такой резвости древней советской машины не в том, что американцы в XXI веке делают плохие марсоходы, а в том, что сам термин «автомат» по отношению к исследованиям космоса годится мало, скорее вводя в заблуждение поклонников концепции о том, что человеку нечего делать в космосе.

Если выражаться точнее, никаких планетоходов-автоматов на сегодня не существует. Как и «Луноходы», американские марсоходы суть дистанционно управляемые машины, что-то типа тех, которыми каждый из нас развлекался в детстве. Как и с игрушечными машинками, на пересеченной местности управлять ими надо аккуратно, иначе они забуксуют и встанут. Именно так погиб «Луноход-2».
Аналогичным образом почти фатально застрял в 2005 году Opportunity, причем «дюна», в которой он это сделал, высотой была всего 30 сантиметров. Взрослый мужчина может вытолкать автомобиль из такой «дюны» вручную, но на Марсе никакого мужчины нет. И если бы не везение и длительные попытки выбраться, марсоход мог бы остановиться еще в начале пути.
Причины, по которым Opportunity за месяц проезжал меньше, чем «Луноход-2» за день, лежат в той же области. Дистанционно управляемая машина на Луне находится в 1,3 световых секунды, а на Марсе – минимум в 280 световых секундах от земного оператора. Что еще важнее, Луна всегда развернута к Земле одной стороной, поэтому связь с луноходами была постоянной. Марс вращается, и сеансы связи (короче часа) случаются раз (максимум два) в сутки.
На первый взгляд кажется, что связь можно сделать и постоянной, просто разместив на ареоцентрической орбите Марса (17 тысяч километров над ним) аналог геостационарного спутника-ретранслятора. На практике выделенный спутник на такой орбите будет тяжелым (ареостационарная орбита находится между орбитами Фобоса и Деймоса, отчего спутнику придется тратить немало топлива на частые коррекции орбиты).

Да и не станет никто обеспечивать планетоход таким дорогим и сложным напарником, как ареостационарный спутник, срок деятельности которого, судя по его геостационарным коллегам, может быть заметно меньше, чем у самого марсохода. Тот же Curiosity и сейчас использует спутники-ретрансляторы, потому что мощности его передатчика до Земли напрямую могло бы не хватить. Но спутники эти проходят над аппаратом за десятки минут, столько же длятся сеансы общения с Землей. Постоянной связью такое назвать сложно.
Увидев интересный камень на очередном сеансе связи, оператор марсохода дает ему команду проехать немного по направлению к этому камню. А на следующие сутки смотрит, нет ли на пути к нужному камню песчаной дюны высотой в смертельно опасные для автомата 30 сантиметров. Если ее нет, дает команду проехать еще чуть-чуть. На третьи сутки, если камень был близко, дается команда протянуть манипулятор к камню. На четвертые – смотрят, правильно ли манипулятор взял камень. Если да – подают команду на работу с ним. И так далее, без конца.
Работать только там, где легко
Может показаться, что медлительностью работы «автоматов» (которые на деле вовсе не автоматы) можно пренебречь. Пусть медленно, но дело они свое сделают. Увы, все чуть сложнее. Любой планетоход на сегодня обречен работать не там, где ученым хотелось бы, а там, где ему проще. Никто не погонит его по крутому склону с сыпучим грунтом – вроде того, на котором были найдены следы потоков, подозрительно напоминающих водные. Аппарат ценой в миллиарды долларов избегает даже 30 сантиметров песка на ровной поверхности – ему не до крутых склонов.
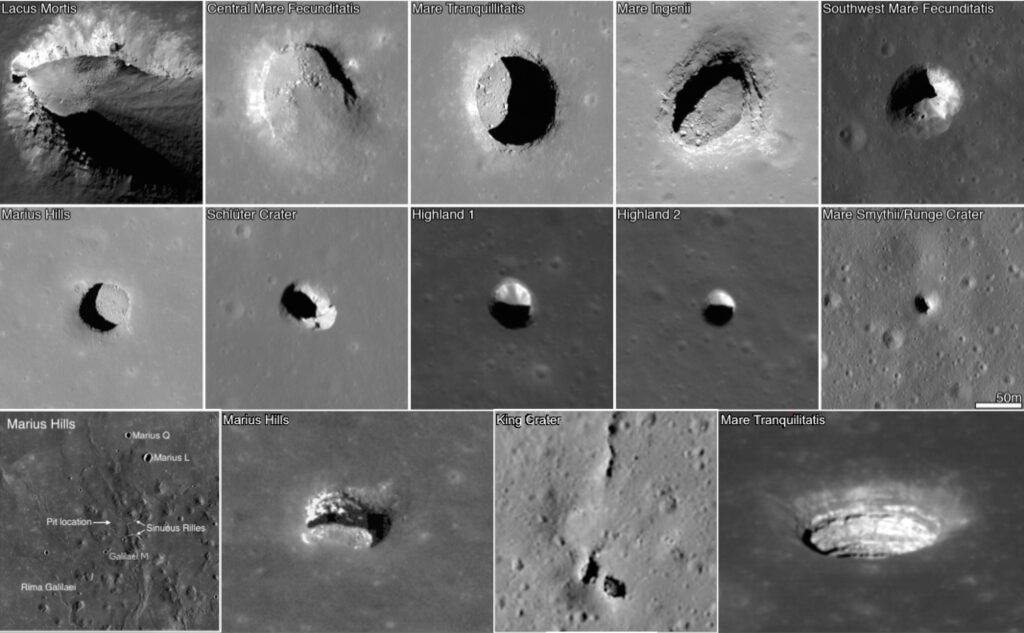
Но и это лишь верхушка айсберга. Самые интересные места Красной планеты и тех же Луны с Титаном находятся под их поверхностями. Здесь мы даже не говорим о громадных подземных озерах Марса или гипотетическом подповерхностном океане Титана. Речь о совсем близких к поверхности лавовых трубках. Это огромные, многокилометровые (из-за низкой гравитации) полости, оставленные раскаленными газами во время вулканических извержений на Луне и Марсе.

И там, и там в прошлом на поверхности было немало воды и водяного пара, из-за чего есть предположения, что в лавовых пещерах скопилось много льда – как водного, так и, возможно, углекислотного. Лавовые трубки теоретически могут уходить вниз довольно глубоко – туда, где температура выше нуля по Цельсию. В условиях Марса это может означать жидкую воду – и потенциальную жизнь. Было бы неплохо исследовать лавовые трубки, тем более что выходы в них там зачастую открыты и имеют большие размеры.
С автоматами это невозможно. Радиоуправляемую машину не отправишь в пещеру, куда радиосигналы не пройдут. Даже ретранслятор у входа (который отнимет дополнительные массу и энергию) не поможет, как только планетоход завернет за угол. Да и сможет ли он там передвигаться? Гладкий лед у входа может оказаться непреодолимым для машины, застревающей в 30 сантиметрах песка. Склоны лавовых трубок довольно крутые: туда можно спуститься на тросе, но автоматы не мастера альпинизма даже на Земле, не то что на Марсе или Луне.
К сожалению, это еще не все. Автомат не может быть подобен человеку в плане универсальности манипуляторов и навыков. Человек способен выкопать шанцевым инструментом довольно глубокую яму и даже ручным буром добраться на глубину больше метра. Автоматический бур может пробиться настолько глубоко, только если это устройство метровых размеров и большой массы. Это слишком тяжелое устройство для планетохода.
Поэтому на практике буры у них маленькие, «карманные», и рекорд бурения, поставленный планетоходом на сегодня, – 7,5 сантиметра (Curiosity). А все самое интересное на Марсе лежит глубже метра: именно там грунт достаточно эффективно защищает от радиации и перепадов температур на поверхности.
На той же глубине существуют бактериальные колонии в земных пустынях. В 2011 году испанские и чилийские исследователи сымитировали поиск жизни на Марсе в условиях пустыни Атакама. Ее выбрали за содержание в грунте хлоридов и перхлоратов – компонентов, типичных для марсианского реголита. В итоге при анализе образцов, извлеченных машинным бурением, там смогли найти жизнь, но на глубине не менее двух метров. Значит, даже если бы Curiosity все семь лет своей работы ездил прямо над такими бактериальными колониями, он не смог бы их обнаружить. Исследователям легко было доставить в Атакаму большой бур, но вот на Марс его закинуть сложно.
Другой важный момент: бактериальные колонии разбросаны пятнами под поверхностью Атакамы. В наземных испытаниях несложно переставлять пятиметровый бур с места на место. На Марсе подобное устройство слишком тяжело для мобильных планетоходов. А неподвижному посадочному аппарату с буром может просто не повезти наткнуться на местный аналог атакамской бактериальной колонии. Иными словами, аппараты, которые мы посылаем искать простейшую жизнь на Марсе, технически не способны найти жизнь даже в земной пустыне.
Конечно, можно отправить на Красную планету специализированный неподвижный автомат-бурильщик: вдруг ему повезет, и что-то интересное случайно окажется прямо под его точкой посадки. Именно так поступило NASA, отправив на Марс InSight. Правда, конкретно этот аппарат ищет не жизнь, но, как станет ясно ниже, проблемы бурения его тоже не миновали. К сожалению, и этот «автомат» (все его действия управляются радиокомандами с Земли) пока показал себя не с лучшей стороны. Недавно он то ли лишился сцепления с грунтом, то ли наткнулся на камень – в итоге бурение заглохло на первых 30 сантиметрах.
Ряд СМИ вскоре оптимистично написали: «InSight переставил буровую установку HP3 на другое место» – по идее, это позволяет вздохнуть с облегчением. На самом деле, все не так: машины высокоспециализированы. InSight просто не может переставить буровую установку: она для этого слишком велика, а возможности «автомата» слишком скромны. Он лишь перенес в другое место поддерживающую структуру для своего бурящего устройства, чтобы операторы лучше видели, что с ним происходит.
Если под ним отдельный крупный камень, бурить дальше не выйдет. Потому что этот «автомат» настолько специализирован, что, как сообщает NASA, «роботизированный манипулятор не спроектирован для подъема «крота» (бурящее устройство HP3. — Прим. ред.) после того, как он отделен от поддерживающей структуры, так что он не сможет переставить «крота», если скала блокирует ему путь вниз». Итак, мы еще раз убеждаемся: телеуправляемые машины – узкие специалисты, манипуляторы которых не имеют столь же широких возможностей, как человеческие руки. Последние могут поднимать груз, а «руки» InSight – нет.
В теории крупный носитель может доставить к другой планете посадочный модуль, из которого выведет большой мобильный буровой комплекс массой в тонны, способный и бурить на метры в глубину, и перемещаться между бурениями на нужную дистанцию. И даже приложить к нему взлетающий модуль для возврата сотен килограммов грунта на Землю. Но надо понимать, что затраты на такой дистанционно управляемый аппарат по необходимости сблизятся с пилотируемой экспедицией: мягко приземлить несколько тонн на другую планету означает использование посадочных средств, по сложности и массе сопоставимых с посадочным модулем для людей.
Масса пары астронавтов со всем необходимым для краткой высадки (по опыту 1969 года) сопоставима с весом того же марсохода Curiosity. При этом пилотируемая экспедиция имеет меньший шанс на фатальное застревание при перемещении (так автоматы погибали и на Луне, и на Марсе) и все равно будет заметно универсальнее специализированного подвижного бура.
Все это означает, что пока автоматы по изучению планет «на месте» работают как персонаж анекдота, который потерял ключи у темного подъезда, но ищет их под фонарем – только потому, что там светлее. Они не исследуют глубины, которые перспективнее всего. Они выбирают по возможности плоскую местность без дюн, где могут работать хоть как-нибудь.
Как ни крути, выяснить таким образом, есть ли жизнь на Марсе, а равно и исследовать самые интересные места Луны – не получится. Очевидно, если мы, люди, хотим ответить на эти вопросы, то все, что нам остается, – готовить туда пилотируемые экспедиции. К счастью, в последние годы в этом направлении удалось сделать немало. Если не в 2020-х, то в 30-х годах этого столетия человек может все-таки достигнуть Красной планеты. А там и ответы на заветные вопросы будут найдены – причем скорее рано, чем поздно.
Нашли опечатку? Выделите фрагмент и нажмите Ctrl + Enter.